1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
| start.S
.text
.global _start
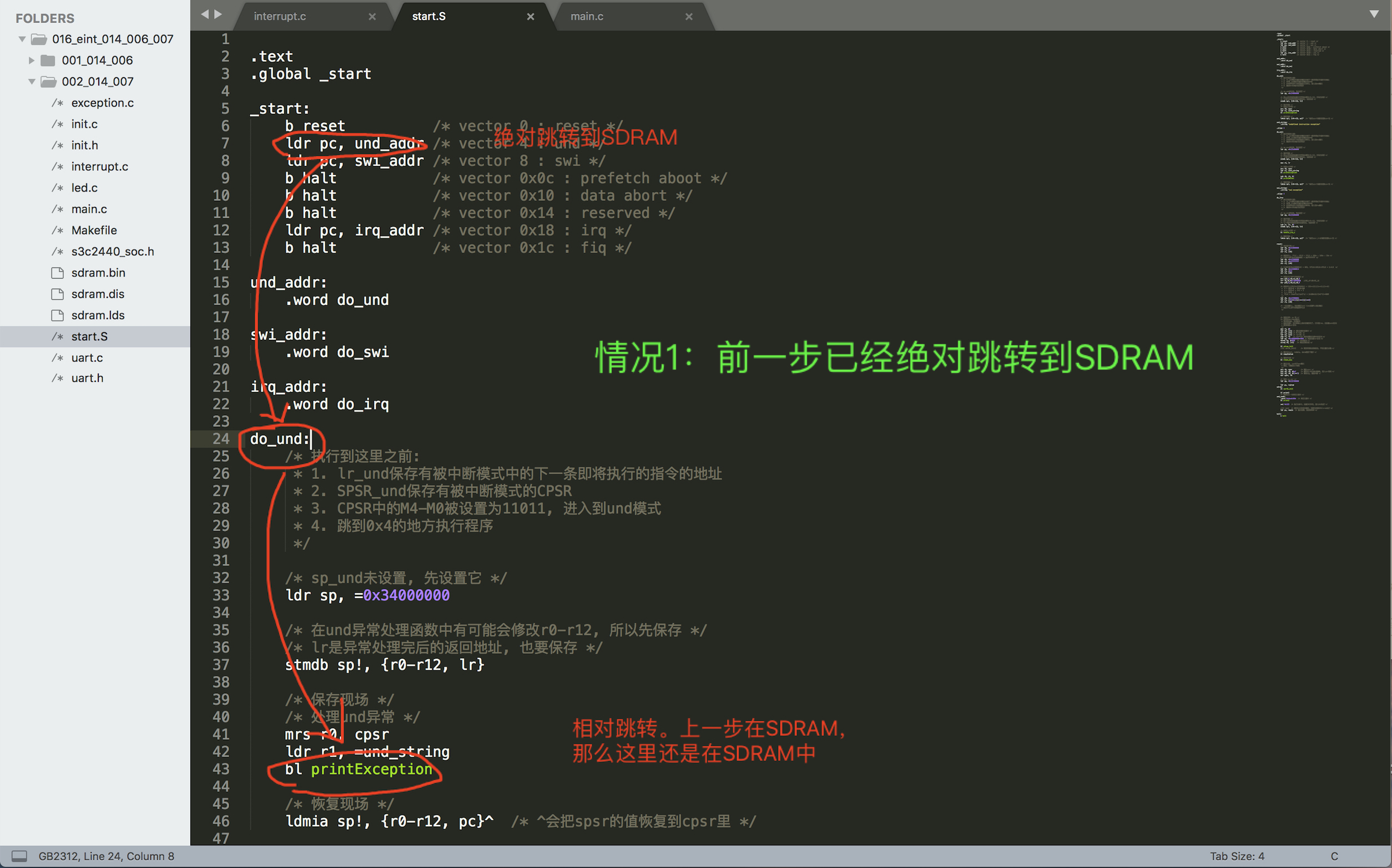
_start:
b reset
ldr pc, und_addr
ldr pc, swi_addr
b halt
b halt
b halt
ldr pc, irq_addr
b halt
und_addr:
.word do_und
swi_addr:
.word do_swi
irq_addr:
.word do_irq
do_und:
ldr sp, =0x34000000
stmdb sp!, {r0-r12, lr}
mrs r0, cpsr
ldr r1, =und_string
bl printException
ldmia sp!, {r0-r12, pc}^
und_string:
.string "undefined instruction exception"
.align 4
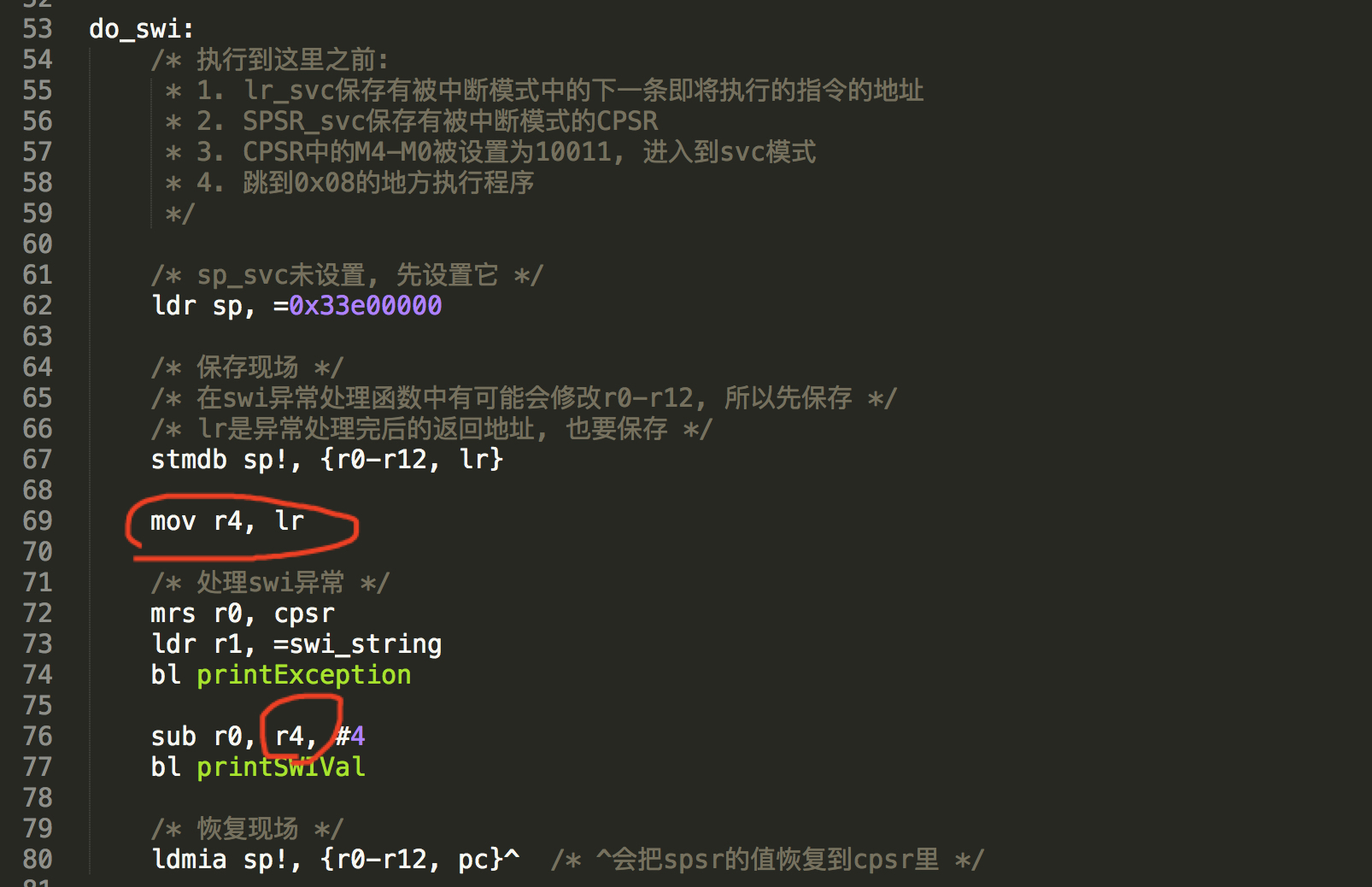
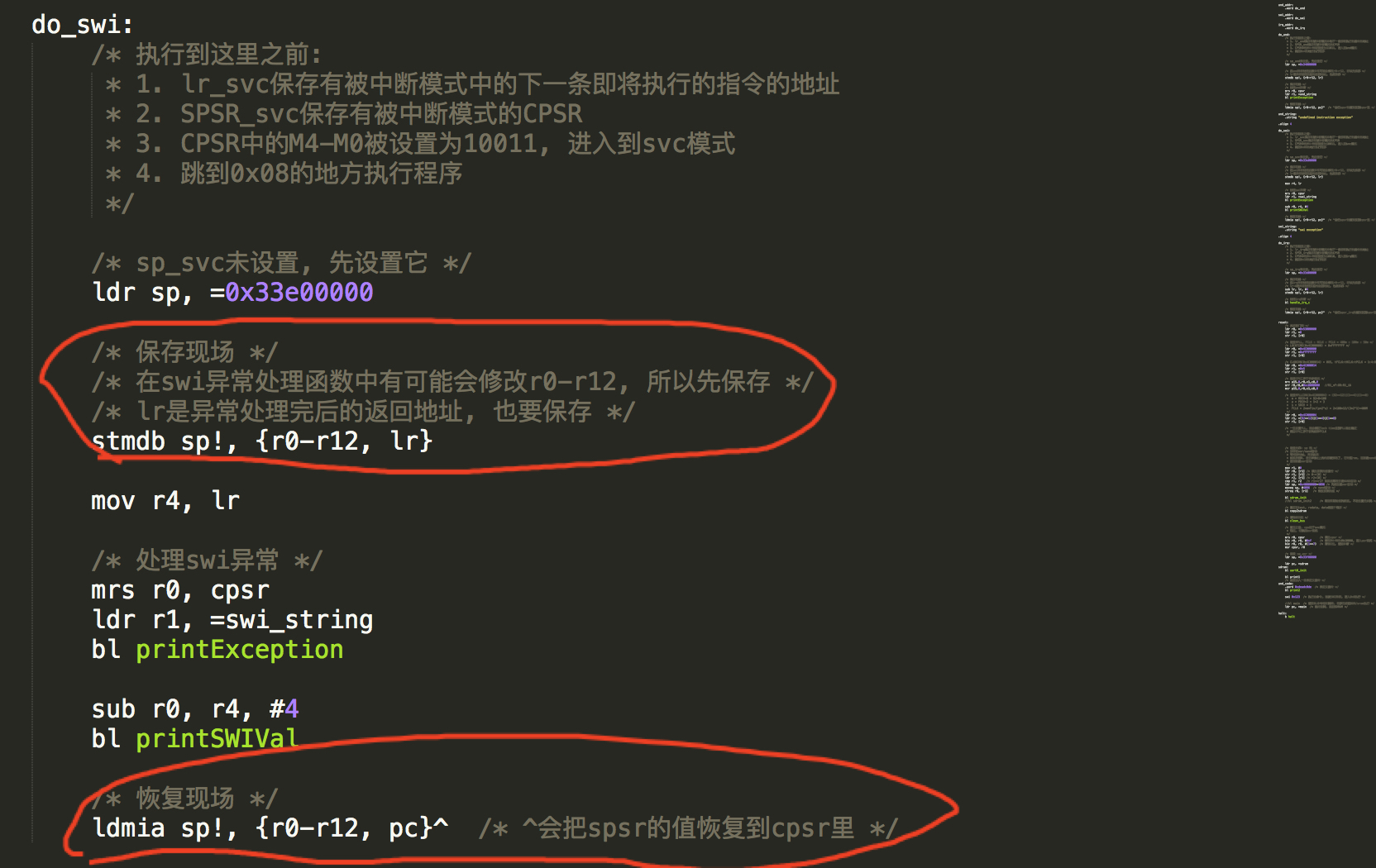
do_swi:
ldr sp, =0x33e00000
stmdb sp!, {r0-r12, lr}
mov r4, lr
mrs r0, cpsr
ldr r1, =swi_string
bl printException
sub r0, r4, #4
bl printSWIVal
ldmia sp!, {r0-r12, pc}^
swi_string:
.string "swi exception"
.align 4
do_irq:
ldr sp, =0x33d00000
sub lr, lr, #4
stmdb sp!, {r0-r12, lr}
bl handle_irq_c
ldmia sp!, {r0-r12, pc}^
reset:
ldr r0, =0x53000000
ldr r1, =0
str r1, [r0]
ldr r0, =0x4C000000
ldr r1, =0xFFFFFFFF
str r1, [r0]
ldr r0, =0x4C000014
ldr r1, =0x5
str r1, [r0]
mrc p15,0,r0,c1,c0,0
orr r0,r0,#0xc0000000
mcr p15,0,r0,c1,c0,0
ldr r0, =0x4C000004
ldr r1, =(92<<12)|(1<<4)|(1<<0)
str r1, [r0]
mov r1, #0
ldr r0, [r1]
str r1, [r1]
ldr r2, [r1]
cmp r1, r2
ldr sp, =0x40000000+4096
moveq sp, #4096
streq r0, [r1]
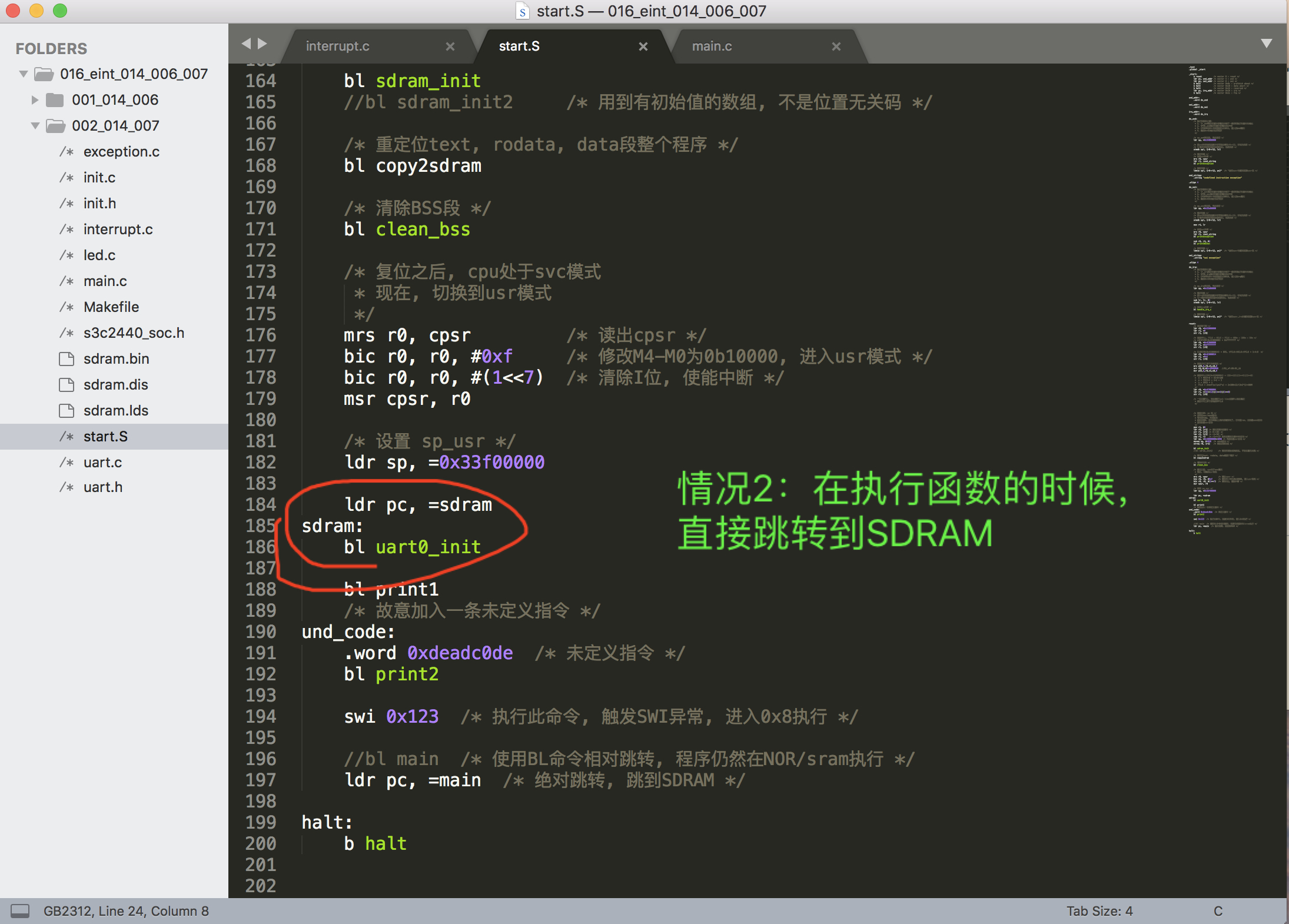
bl sdram_init
bl copy2sdram
bl clean_bss
mrs r0, cpsr
bic r0, r0, #0xf
bic r0, r0, #(1<<7)
msr cpsr, r0
ldr sp, =0x33f00000
ldr pc, =sdram
sdram:
bl uart0_init
bl print1
und_code:
.word 0xdeadc0de
bl print2
swi 0x123
ldr pc, =main
halt:
b halt
|