2020年5月4日 下午12:04
总体认识:
- 进程进程之间的通信有多种方式:
- 管道(两种)
- 消息队列
- 共享内存
- 这三种共享的方式我认为都是对linux内核模块的调用,从而完成的业务功能而已,除了业务逻辑以外,也没啥好说的,就像别人开发出业务接口你调用就行了。
- 在进程通信中涉及到信号的知识,我觉得信号的特殊性在于:linux内核中就对信号进行了设计和规定,并且也有相应的内核机制的保证,他并不完全由上层的业务逻辑所决定。
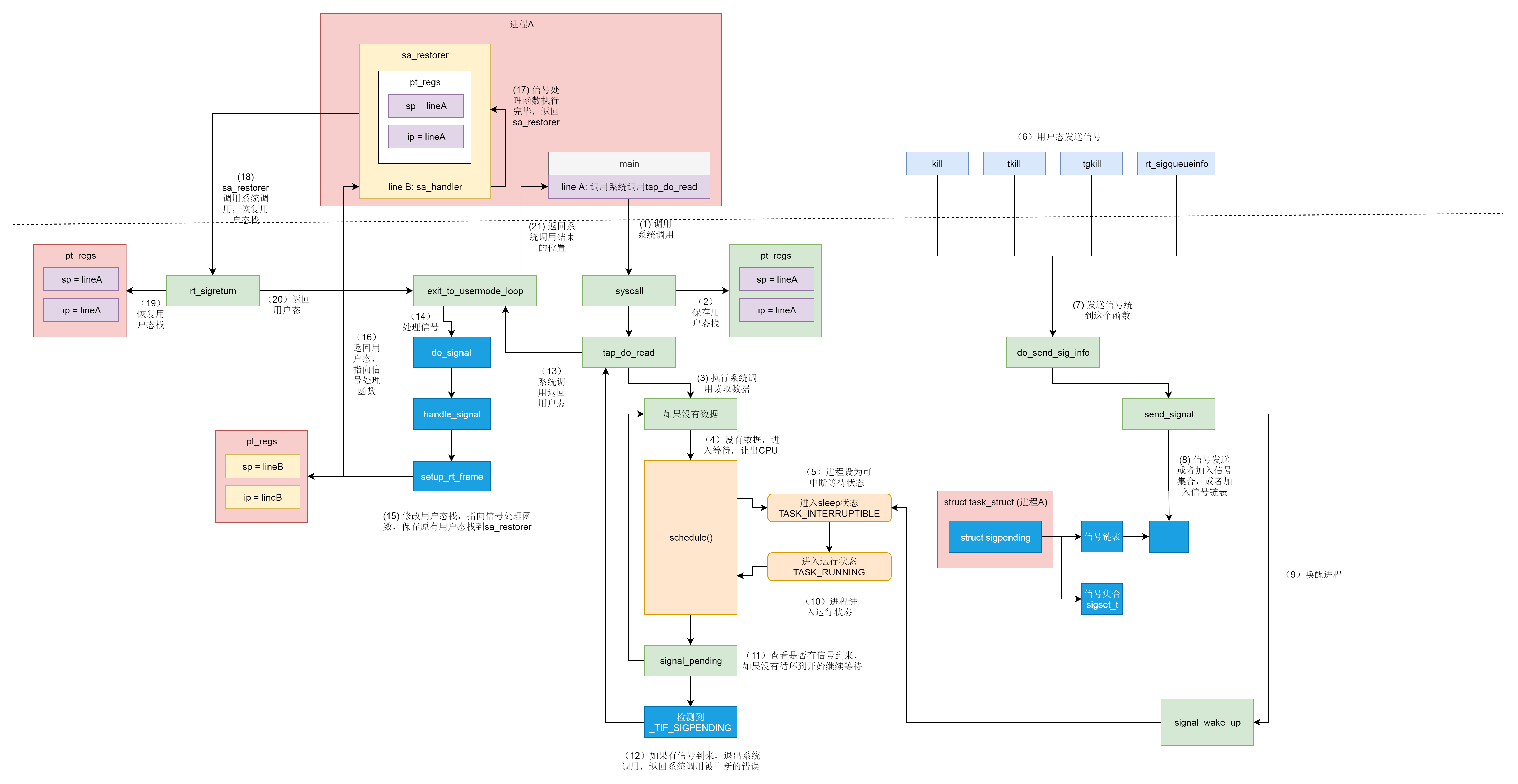
- 信号的发送与处理是一个复杂的过程,这里来总结一下。
- 假设我们有一个进程 A,main 函数里面调用系统调用进入内核。
- 按照系统调用的原理,会将用户态栈的信息保存在 pt_regs 里面,也即记住原来用户态是运行到了 line A 的地方。
- 在内核中执行系统调用读取数据。
- 当发现没有什么数据可读取的时候,只好进入睡眠状态,并且调用 schedule 让出 CPU,这是进程调度第一定律。
- 将进程状态设置为 TASK_INTERRUPTIBLE,可中断的睡眠状态,也即如果有信号来的话,是可以唤醒它的。
- 其他的进程或者 shell 发送一个信号,有四个函数可以调用 kill、tkill、tgkill、rt_sigqueueinfo。
- 四个发送信号的函数,在内核中最终都是调用 do_send_sig_info。
- do_send_sig_info 调用 send_signal 给进程 A 发送一个信号,其实就是找到进程 A 的 task_struct,或者加入信号集合,为不可靠信号,或者加入信号链表,为可靠信号。
- do_send_sig_info 调用 signal_wake_up 唤醒进程 A。
- 进程 A 重新进入运行状态 TASK_RUNNING,根据进程调度第一定律,一定会接着 schedule 运行。
- 进程 A 被唤醒后,检查是否有信号到来,如果没有,重新循环到一开始,尝试再次读取数据,如果还是没有数据,再次进入 TASK_INTERRUPTIBLE,即可中断的睡眠状态。
- 当发现有信号到来的时候,就返回当前正在执行的系统调用,并返回一个错误表示系统调用被中断了。
- 系统调用返回的时候,会调用 exit_to_usermode_loop。这是一个处理信号的时机。
- 调用 do_signal 开始处理信号。
- 根据信号,得到信号处理函数 sa_handler,然后修改 pt_regs 中的用户态栈的信息,让 pt_regs 指向 sa_handler。同时修改用户态的栈,插入一个栈帧 sa_restorer,里面保存了原来的指向 line A 的 pt_regs,并且设置让 sa_handler 运行完毕后,跳到 sa_restorer 运行。
- 返回用户态,由于 pt_regs 已经设置为 sa_handler,则返回用户态执行 sa_handler。
- sa_handler 执行完毕后,信号处理函数就执行完了,接着根据第 15 步对于用户态栈帧的修改,会跳到 sa_restorer 运行。
- sa_restorer 会调用系统调用 rt_sigreturn 再次进入内核。
- 在内核中,rt_sigreturn 恢复原来的 pt_regs,重新指向 line A。
- 从 rt_sigreturn 返回用户态,还是调用 exit_to_usermode_loop。
- 这次因为 pt_regs 已经指向 line A 了,于是就到了进程 A 中,接着系统调用之后运行,当然这个系统调用返回的是它被中断了,没有执行完的错误。
- 我认为最关键理解的是第六步骤:其他的进程或者 shell 发送一个信号,有四个函数可以调用 kill、tkill、tgkill、rt_sigqueueinfo。
- 要理解这就话需要理解进程的相关知识,尤其是进程的调度 linux内核任务调度子系统
- 要理解这就话需要理解进程的相关知识,尤其是进程的调度 linux内核任务调度子系统